Challenge: Fold a Flexible Circuit into a Cuboid-Shaped Rover
This small robot, powered by a PCB motor, was created using a foldable flexible circuit. The six-sided circuit is secured with the wheel's bolted shaft and includes all the necessary sensors and drivers to operate the four motors and control the robot.
The results were quite satisfying, but further development is needed for this bot to navigate the outside world effectively.
Watch Video
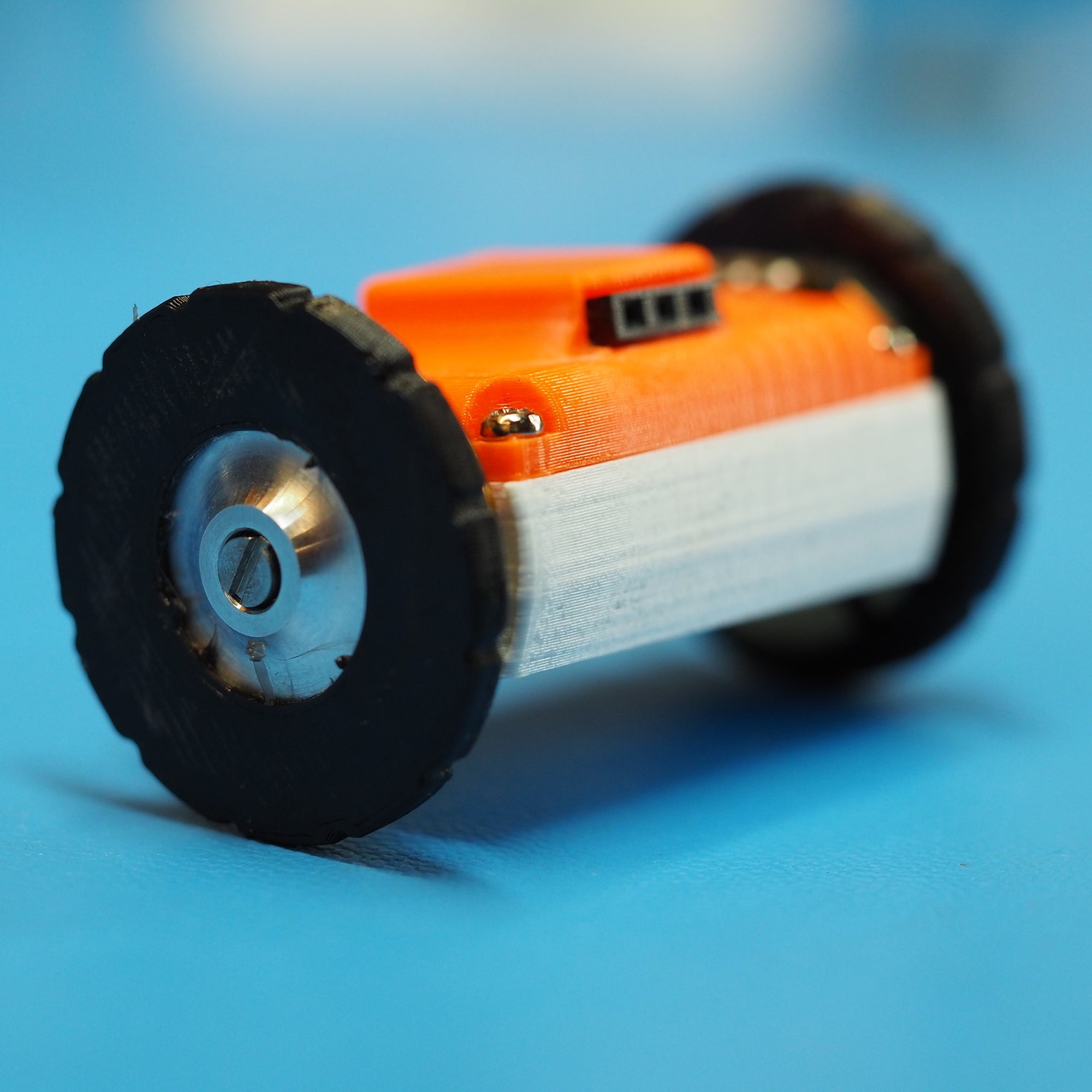
Challenge: Build a 2-Wheeled PCB Motor Robot
Developing this robot highlighted all the weaknesses and defects in our PCB Motor project. However, over time, all mechanical issues were resolved, and this little bot managed to drive quite well.
The fact that this robot uses a flat PCB Motor to drive itself means that it has more internal space. This, in turn, allows it to use a larger 500mA battery, extending its battery life.
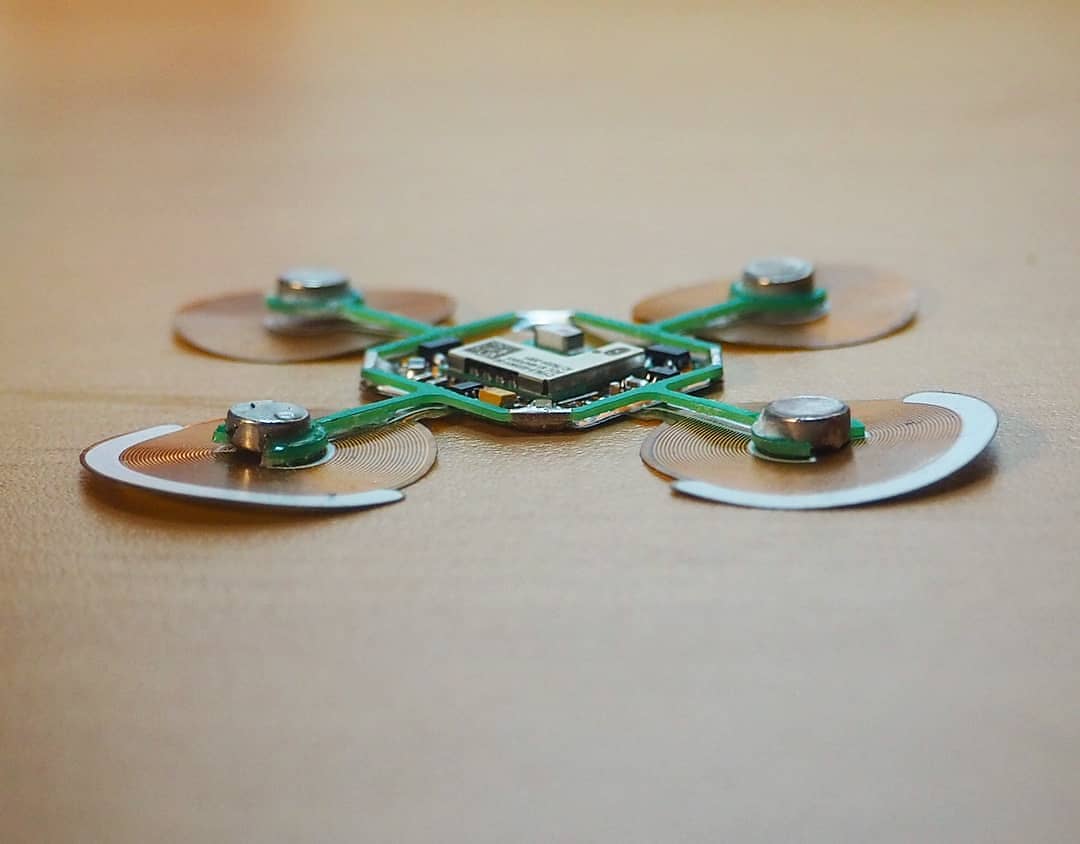
Watch VideoChallenge: Use a Flexible Circuit to create a Jumping RoboFrog
This robot was made from one flexible circuit. It's like a double-decker; on the bottom side, there are four coils, and the top side has magnets and control electronics.
The whole thing managed to jump off a few millimeters; however, left/right maneuvers were still unable to be controlled.
Watch Video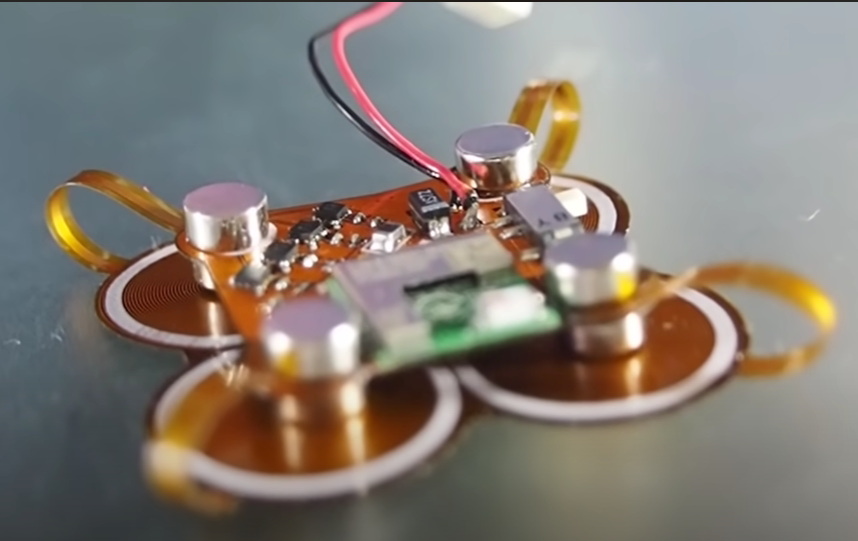

Challenge: Build a Robot from One Flexible Circuit
This robot adopts a scissors-type concept designed to walk by flapping a magnetic flexible PCB actuator.
Unfortunately, the results were not as satisfactory as expected, as the robot exhibited better movement through vibration rather than the intended flapping. Nonetheless, this failure provided valuable insights and lessons for future projects.
Watch VideoChallenge: Create a Baseball 4-legged Robot Transformer
4B (Four-Ball) is a four-legged robot with 12 DOF that folds into a 6cm ball – that’s smaller than a baseball! To achieve this, every linkage had to perfectly align into the sphere while leaving space for the battery and brain.
Although tiny, it has three linkages on each leg and joints powered by micro servomotors. The overall weight of the robot had to be light enough for these tiny motors to provide sufficient torque and lift its own weight on at least three legs.
The robot managed to perform a walking gait, although the z-axis motion was very limited. It also failed to control rolling due to an uneven center-of-gravity.
Watch Video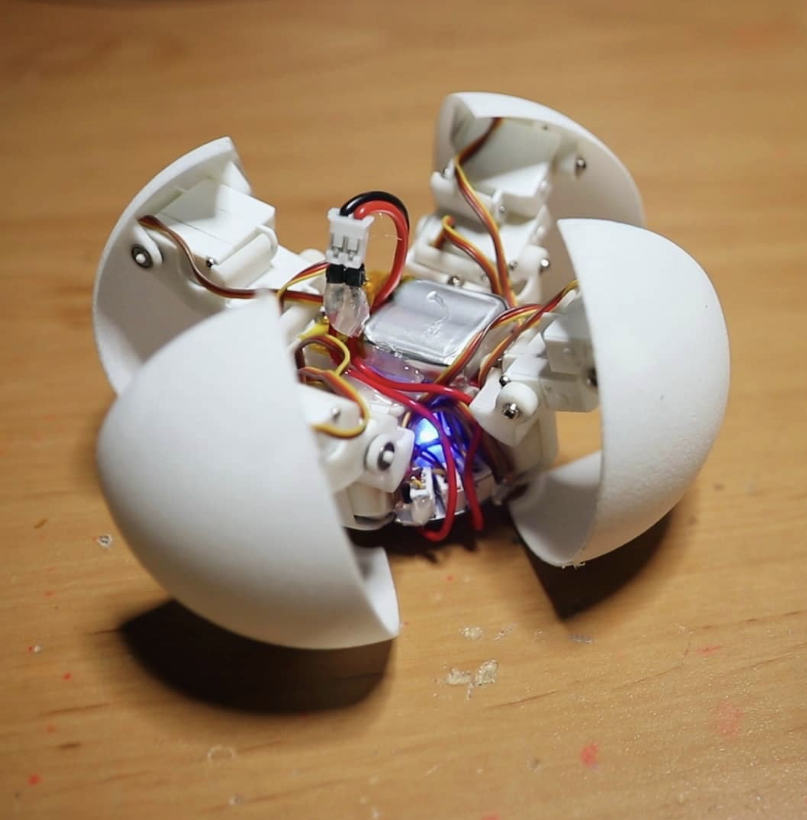
Challenge: Build a Robot from Just Printed Circuit Boards
What if the brain of your robot (the Printed Circuit Board) could also be used to actuate the robot around?
This is how it all started! creating a robot from the PCB itself. The goal was to reduce costs, making it an ideal scenario for swarm robotics.
The crawling robot concept worked quite well, although it faced some balancing issues with the battery, which would be challenging to fine-tune for multiple bots.
Watch VideoBe the first to know about new projects and get exciting deals!